摘 要:本文介紹了垃圾紙帶成(chéng)形機的工藝和難點, 并同時給出各個工藝環節的電氣解決方案,采用OMRON的運動控制器MCH71實現,具有重要的使用參考價值。
關鍵詞:運動控制器 伺服 Mechatrolink-II總線 虛軸 同步
1.引 言
随著(zhe)印刷技術的不斷發(fā)展的今天,印刷機的控制技術也在不斷的進(jìn)步,越來越向(xiàng)數字化、智能(néng)化發(fā)展,生産的高效率和産品的高質量要求使得一些高精度電氣系統和高性能(néng)自動控制系統應運而生,而自動控制系統的使用,使複雜的印刷工藝變得簡單精确,并且越來越多的機械部分也由電氣系統所取代,下面(miàn)將(jiāng)介紹一下OMRON運動控制系統在多軸套色印刷機上的應用。
2. 系統工藝要求
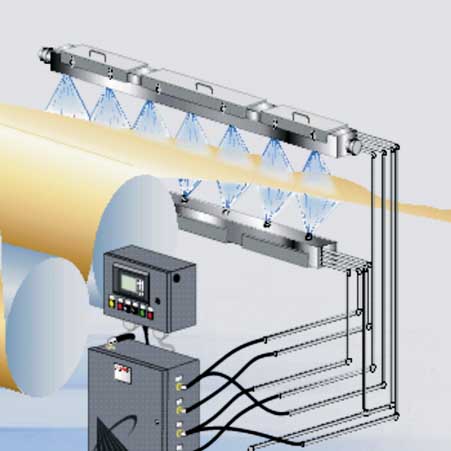
這(zhè)套設備是垃圾紙帶成(chéng)形機,成(chéng)形過(guò)程中需要在垃圾紙帶上進(jìn)行套色、塗膠、打孔、切斷,原有系統是通過(guò)一個主電機帶動其他印刷、塗膠、打孔、切斷等單元進(jìn)行動作,通過(guò)一組主傳動凸輪機構進(jìn)行剛性連接,由于機械凸輪機構的存在,不僅給設計、開(kāi)發(fā)、維護造成(chéng)困難,而且帶來了諸如體積大,造價高等一些列問題。
現在客戶希望通過(guò)電氣化無軸傳動控制系統取代原有的傳動齒輪、軸傳動,從而使機器的制造、安裝、保養更簡單,減少了機械故障。由于使用了無軸傳動技術,各個單元由伺服電機獨立控制驅動,主軸與套色塗膠、打孔、切斷等單元之間的同步由歐姆龍高級運動單元CJ1W-MCH71進(jìn)行控制,操作、開(kāi)發(fā)、使用非常簡單,而且暫時不用的單元也可方便地離合。
采用無軸無齒輪傳動技術,每個單元都(dōu)獨立控制,運用最新的伺服電機和運動控制系統,能(néng)充分保證套色、塗膠、打孔、切斷與主軸同步運轉要求。
整個系統分印刷前系統和印刷後(hòu)系統,其中印刷前系統包括2次印刷套色,塗膠;印刷後(hòu)系統包括打孔,成(chéng)形、切斷。每個單元具體工藝如附表所示:
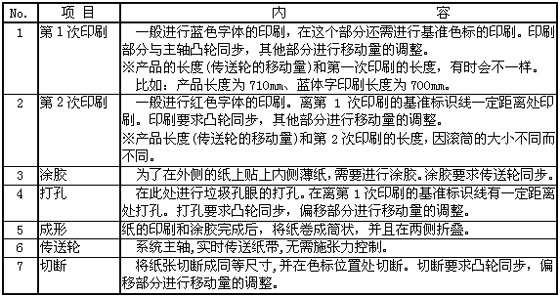
附表 單元工藝
套色印刷位置精度爲±0.5mm,速度35m/min,印刷紙張寬度可以調節。系統工藝原理如圖1所示:
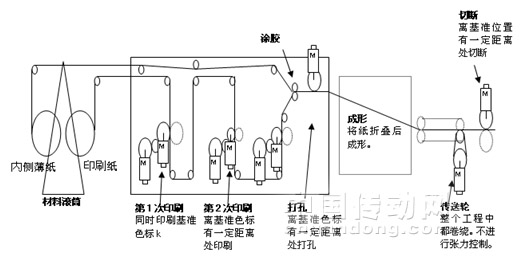
圖1 系統工藝原理圖
3 系統方案
l 傳送輪:傳送輪是整套設備的主軸[J01],按照一定的線速度運動,其他軸與主軸同步。
l 第1、2次印刷:兩(liǎng)個印刷軸[J02],[J03]與主軸[J01]按照一定轉動角度進(jìn)行同步運動,由于每次套色印刷都(dōu)要進(jìn)行色标跟蹤,所以需要通過(guò)檢測标記來對(duì)每一次凸輪運動進(jìn)行修正。
l 塗膠: 塗膠軸[J04]完成(chéng)内側薄模與外層粘合,因此隻要進(jìn)行簡單的與主軸進(jìn)行一定比例的同步控制即可。
l 打孔、切斷:這(zhè)2軸 [05],[J06]必須與主軸按照一定轉動角度進(jìn)行同步運動,當進(jìn)行塗膠、打孔、切斷時,3軸與主軸凸輪同步,當沒(méi)有進(jìn)行這(zhè)三個操作時,速度可以調節,這(zhè)樣(yàng)的話需要使用電子凸輪,并且可以在線改變凸輪角度。
完成(chéng)一次印刷的時序圖如圖2所示:
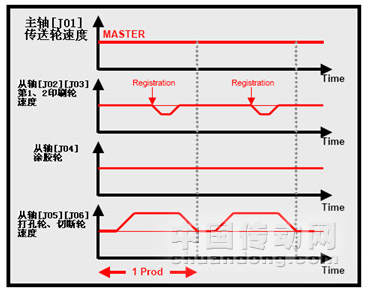
圖2 一次印刷的時序圖
4 .系統配置
控制方案可以采用基于CJ1系列的CJ1W-MCH71控制器,通過(guò)ML2高速通訊總線來實現多達30個實軸的同步控制,驅動器采用R88D-WN××-ML2系列内置ML2通訊口的伺服驅動器,觸摸屏采用NS-10系列的觸摸屏,通過(guò)SAP内置控件完成(chéng)畫面(miàn)編輯與控制。系統配置圖如圖3所示:
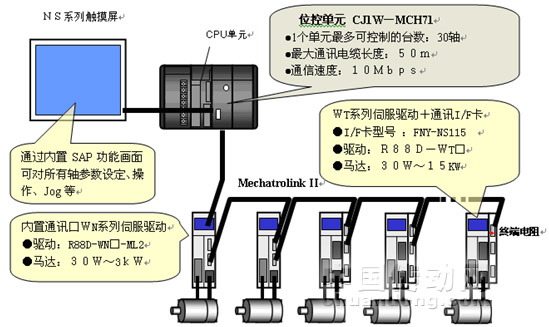
圖3 系統配置圖
5 部分程序說明
5.1傳送輪(主軸[J01])
傳送輪以恒定的線速度進(jìn)行運動,可以通過(guò)SPEED即速度控制指令來完成(chéng),程序如下:
SPEED[J01]#IW0B01 T2000;
…….
SPEEDR[J01] T2000;
傳送輪以一定的速度命令運動,加速時間爲2000ms,其中速度可以通過(guò)變量IW0B01進(jìn)行給定;傳動輪在減速時間爲2000ms停止運動。
5.2第1、2次印刷(從軸[J02]、[J03])
由于需要色标跟蹤,所以需要通過(guò)色标進(jìn)行修正,在從軸與主軸進(jìn)行同步運動時,需要疊加修正的偏差量,如果機械部分調節到最佳狀态的話,那麼(me)修正值就越小,要完成(chéng)修正控制,就要使用虛軸。虛軸是計算機内部假想軸,運動狀态和實軸一樣(yàng),可以讀取虛軸當前位移量,由于沒(méi)有真實的位置反饋回路,因此實際反饋與目标位置相同,沒(méi)有誤差,將(jiāng)實軸與虛軸進(jìn)行數學(xué)相加後(hòu)可以得到合成(chéng)以後(hòu)的實軸運動。實軸與虛軸速對(duì)軌迹疊加後(hòu)的合成(chéng)軌迹如圖4所示:
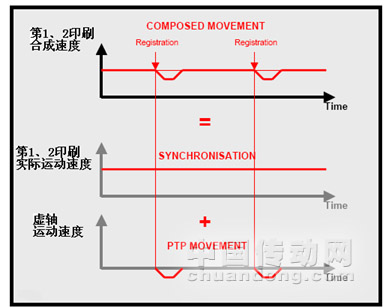
圖4 實軸與虛軸合成(chéng)軌迹
伺服驅動器CN1接口中有三個可供分配的外圍輸入端子可以作爲鎖定編碼器計數值的功能(néng),延遲時間僅爲3μs,但是對(duì)驅動器來說,同一時刻隻有一個輸入有效,最大需要在80ms以後(hòu),進(jìn)行下一個鎖定輸入,需要進(jìn)行時間的調整。另外在每個周期必須將(jiāng)當前讀取位置值進(jìn)行運算後(hòu)清零,才能(néng)保證下一次與目标設定值進(jìn)行正确的比較計算,得出偏差值。以第1印刷輪[J02]爲例,將(jiāng)标記目标設定值存放在變量#ML0004中,用ADDAX指令,進(jìn)行實軸與虛軸[J32]的疊加操作,用LATCH指令鎖定當前位置信息存放在變量#ML000中,程序如下:
ADDAX [J02][J32];
…
CONNECT [J02]1[J01]1;
…
IF #IB0B000==1;
LATCH [J01]#ML0000;
WAIT #SW022A==2;
WAIT #SW022A==4;
#ML0002=#ML0000-#ML0004;
INC MOVE [32]#ML0002;
…
ENDIF;
…
[J02]將(jiāng)虛軸[J32]位置疊加到[J02],然後(hòu)以1:1的比率與主軸同步,當位變量#IB0B000位ON後(hòu),將(jiāng)當前位置信息鎖定存放在變量#ML0000中,等待[J01]的正在執行的鎖定信号直到鎖定操作結束,將(jiāng)當前位置信息與目标設定值進(jìn)行比較,偏差量存放到變量#ML0002中,然後(hòu)虛軸[J32]執行相對(duì)移動,位移量爲變量#ML0002中偏差值。第1、2印刷輪的運動效果圖如圖5所示:
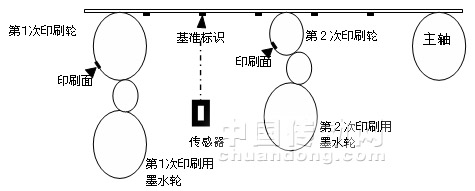
圖5 第1、2印刷輪的運動效果圖
5.3打孔(從軸[J05])
打孔在進(jìn)行操作時,始終保持正轉(或反轉),要與主軸保持同步控制,由于在進(jìn)行打孔和切斷時,電機總是在一定角度範圍内進(jìn)行工作,所以采用電子凸輪方式,預先制作CAM表,如果打孔或者切斷與實際值有偏離的話,可以根據偏離值的正負調用不同的CAM表進(jìn)行修正,同理,可以用虛軸疊加實軸的方式完成(chéng)修正,以打孔[J05]爲例,變量還(hái)是采用2)中的3個變量,其中#ML0012中的同步鏈接的位移可以根據産品長(cháng)度改變,CAM1,CAM2分别存放針對(duì)不同位移量而制作的凸輪控制表,程序如下:
CONNECT [J05]1[J01]1;
ADDAX [J05][J32];
IF #ML0002>0;
CAMBOX [J32]1 [J01]#ML0012 K100. ;
ELSE;
IF #ML0002<0;
CAMBOX [J32]2 [J01]#ML0012 K100. ;
ENDIF;
ENDIF;
6 結束語
采用歐姆龍的運動控制MCH71進(jìn)行多軸同步套色印刷的控制,其生産能(néng)力和印品加工質量腳原有機械系統相比有較大提高,同時系統配置的靈活性增加,便欲擴展,同時可以印刷設備延伸到包裝生産線(MCH最大控制軸數30軸),真正實現包裝印刷一體化。
文章來源:中國(guó)傳動網